Прямоточный реактивный двигатель схема
Содержание:
- Содержание
- Сфера применения
- Подготовительный процесс
- Служба
- Крепление
- История создания
- Дозвуковые ПВРД
- История
- Дозвуковые ПВРД
- История
- Устройство
- Полицейские погоны: как пришивать?
- См. также
- Классы реактивных двигателей:
- Прямоточные воздушно-реактивные двигатели
- Гиперзвуковой прямоточный воздушно-реактивный двигатель
- См. также
- Оценка проекта
- Прохождение медицинского освидетельствования в комиссариате
- Принцип работы реактивного двигателя
- От крылатой ракеты Буревеснтик до космического корабля с ядерным двигателем
- Виды компоновок турбовинтовентиляторных двигателей
- Галерея
- Гербы и эмблемы Вооружённых СилПарашютно-десантные, десантно-штурмовые полки
Содержание
Сфера применения
Использование ПВРД на пилотируемых самолетах нецелесообразно, ведь для их запуска нужны дополнительные двигатели. Намного проще сразу установить, например, ТРД. Именно поэтому их применение сводится к установке на крылатые ракеты, летающие мишени и непилотируемые самолеты, летающие со скоростью в пределах от 2 до 5М. В основном это «одноразовые» двигатели, что вполне логично, учитывая их невысокую стоимость и простую конструкцию. Запуск аппаратов с ПВРД осуществляется за счет их разгона до рабочей скорости с помощью самолетов-носителей или ракетных ускорителей.
Гиперзвуковые ПВРД планируется использовать на космических аппаратах, но пока это только теория.
Несмотря на то, что использование ПВРД в настоящее время ограничено, постоянно ведутся работы по улучшению их рабочих характеристик и созданию новых моделей.
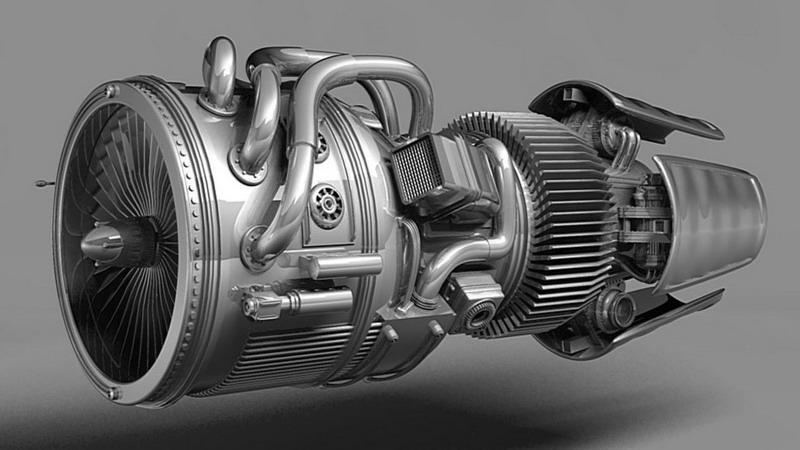
Последняя разработка является двигатель Sabre частной фирмы Reaction Engines.
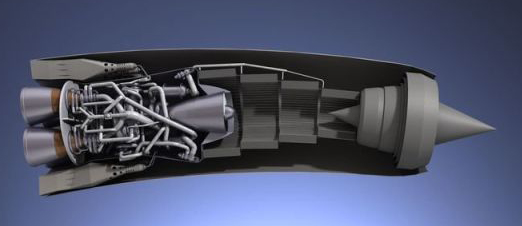
Суть данного двигателя в том, что традиционные двигатели, которые сегодня применяются в авиации, для полета на гипер скоростях требуют спецрезервуаров с жидким кислородом, если самолет развивает в полете скорость более 3000 км/ч. Обыкновенный воздух на таких скоростях нагревается до очень высоких температур, порядка 1000 градусов по Цельсию, что резко понижает термическое КПД. Особенность двигателя Sabre в том, что позволяет применять атмосферный воздух вместо жидкого кислорода. Когда воздух проходит сквозь двигатель, он сжимается и разогревается, в это время он попадает в холодильник, который оснащен целой системой трубок, которые наполняются гелием эти трубки, гелий охлаждает воздух до необходимой температуры. У двигателя Sabre есть одна особенность. Он в состоянии работать в 2-х режимах: как реактивный двигатель и как ракетный двигатель. Устанавливаться он будет на самолете Skylon. Данная аппарат сможет разогнаться в атмосфере в 5 раз быстрее скорости звука и в 25 раз в открытом космическом пространстве.

Skylon готовиться как космический самолет, способный выводить спутники на низкую орбиту. При этом это будет очень выгодная технология. По словам Алана Бонда, являющегося основателем компании, суммы, которые требуются для запуска спутников и других похожих миссий, могут уменьшиться сразу на 95% в том случае, если будет налажено коммерческое производство двигателей Sabre.
Источник
Подготовительный процесс
Прежде чем приступить к сооружению пульсирующего реактивного двигателя своими руками, необходимо очистить листовые металлические заготовки от ржавчины и пыли. Для этого вполне подойдет стандартная шлифовальная машинка. Побеспокойтесь о безопасности – наденьте перчатки, так как края листов острые и изобилуют заусенцами.
Перед началом основных работ нужно подготовить чертежи и картонные шаблоны деталей в натуральную величину. Для получения точной конфигурации и размеров контуры обводят перманентным маркером. Крайне не рекомендуется вырезать развертки при помощи сварочного аппарата, каким бы современным он ни был. Дело в том, что полученные таким способом детали очень плохо свариваются по краям. Желательно для этой цели использовать электрические ножницы по металлу, поскольку в ручном варианте имеется большой риск загибания краев заготовок. Резать нужно аккуратно, надежно зафиксировав обрабатываемый шаблон струбциной или другим подходящим способом.
Служба
Первое строевое авиакрыло В-58 образовано 1 марта 1960 г. на базе Карсуэлл, второе — на базе Банкер Хилл. Части объявили боеготовыми в августе 1962 г., а в сентябре самолёты уже были поставлены на дежурство. Каждое крыло имело три эскадрильи по 12 бомбардировщиков и 4 резервных машины. Интенсивность полётов была достаточно высока: за всё время эксплуатации парк бомбардировщиков налетал 225000 часов.
Треть всех В-58 постоянно несла дежурство на аэродромах в состоянии 15-минутной готовности к старту. Начиная с 1963 г. во время учений практиковались взлёты с минимальным интервалом: до 15-20 самолётов поднимались в воздух за 15 минут. Это был один из наиболее трудных элементов лётной эксплуатации, поскольку задымленность ВПП и опасность столкновения с соседними машинами требовали высокой точности действий экипажей.
В 1959—1960 годы прошёл испытания разведывательный вариант с контейнерной РЛС бокового обзора фирмы Хьюз AN/APQ-69, не позволявшей в силу своей громоздкости (длина антенны более 15 м) выходить на сверхзвук. В 1961—1962 годы испытывался модифицированный контейнер МВ-1, с РЛС бокового обзора (с синтезированной апертурой Гудъир AN/APS-73), имевшей дальность действия 148 км и разрешающую способность всего в 15,2 м. Благодаря малым размерам РЛС область режимов полёта не сузилась, но всё же наибольшую разрешающую способность РЛС имела на дозвуковых скоростях. Один раз система была применена для выполнения реальной задачи — самолёт с РЛС произвёл облёт Кубы во время карибского кризиса 1962 года, что стало единственным случаем «боевого» применения В-58.
Под занавес карьеры в ВВС США два В-58 были дооборудованы для транспортировки четырёх 908-кг бомб Мк.64. На них был нанесён трёхцветный «вьетнамский» камуфляж. Самолёты отрабатывали боевое применение в качестве лидеров групп сверхзвуковых бомбардировщиков. Несмотря на положительные результаты испытаний, принять участие во Вьетнамской войне «Хаслеру» так и не довелось.
Один В-58 использовался в 1960—1964 гг. в качестве летающей лаборатории для испытаний системы управления огнём AN/ASG-18 и ракет AIM-47A (GAR-9), предназначавшихся вначале для «трёхмахового» перехватчика F-108 «Рапира», а затем и для самолёта Lockheed YF-12A, работы по AIM-47A в конце концов привели к созданию ракеты AIM-54 — основному оружию палубного перехватчика F-14. В 1959 г. на одном из В-58А, переоборудованном в летающую лабораторию NB-58A, в подфюзеляжной гондоле проходил испытания двигатель Дженерал Электрик J93-GE-3, предназначенный для использования на бомбардировщике В-70 и перехватчике F-108.
В 1965 году в качестве промежуточного маловысотного бомбардировщика прорыва командование ВВС США решило использовать самолёт FB-111, на смену которому предназначался В-1. Снятие В-58 с вооружения началось в ноябре 1969 года, спустя месяц после поставки первого FB-111, и завершилось через два месяца — 16 января 1970 года.
Крепление
История создания
Первые официально зарегистрированные разработки ПуВРД относятся ко второй половине XIX века. В 60-е годы сразу двое изобретателей независимо друг от друга сумели получить патенты на новый тип двигателя. Имена этих изобретателей – Телешов Н.А. и Шарль де Луврье
В то время их разработки не нашли широкого применения, но уже в начале ХХ века, когда для самолетов подыскивали замену поршневым двигателям, на ПуВРД обратили внимание немецкие конструкторы. Во время Второй мировой войны немцы активно использовали самолет-снаряд ФАУ-1, оснащенный ПуВРД, что объяснялось простотой конструкции этого силового агрегата и его дешевизной, хотя по своим рабочим характеристикам он уступал даже поршневым двигателям
Это был первый и единственный раз в истории, когда этот тип двигателя использовался в массовом производстве самолетов.
Фау-1
После окончания войны ПуВРД остались «в военном деле», где нашли применение в качестве силового агрегата для ракет типа «воздух-поверхность» КБ Южное . Но и здесь со временем они утратили свои позиции из-за ограничения по скорости, необходимости первоначального разгона и низкой эффективности. Примерами использования ПуВРД являются ракеты Fi-103, 10Х, 14Х, 16Х, JB-2. В последние годы наблюдается возобновление интереса к этим двигателям, появляются новые разработки, направленные на его усовершенствование, так что, возможно, в скором будущем ПуВРД вновь станет востребованным в военной авиации. На данный момент пульсирующий воздушно-реактивный двигатель возвращают к жизни в области моделирования, благодаря использованию в исполнении современных конструкционных материалов.
Современное исполнение ПуВРД
Дозвуковые ПВРД
Эта группа двигателей предназначена для обеспечения полетов на скоростях, равных от 0,5 до 1,0 числа Маха. Сжатие воздуха и торможение в таких двигателях происходит в диффузоре – расширяющемся канале устройства на входе потока.
Данные двигатели имеют крайне низкую эффективность. При полетах на скорости М= 0,5 уровень увеличения давления в них равен 1,186, из-за чего идеальный термический КПД для них – всего 4,76%, а если еще и учитывать потери в реальном двигателе, эта величина будет приближаться к нулю. Это значит, что при полетах на скоростях M<0,5 дозвуковой ПВРД неработоспособен.
Но даже на предельной скорости для дозвукового диапазона при М=1 уровень увеличения давления равен 1,89, а идеальный термический коэффициент – всего 16, 7%. Эти показатели в 1,5 раза меньше, чем у поршневых двигателей внутреннего сгорания, и в 2 раза меньше, нежели у газотурбинных двигателей. Газотурбинные и поршневые двигатели к тому же эффективны для использования при работе в стационарном положении. Поэтому прямоточные дозвуковые двигатели в сравнении с другими авиационными двигателями оказались неконкурентоспособными и в настоящее время серийно не выпускаются.
История
Начиная со Второй мировой войны тратились значительные усилия на исследования в области достижения больших скоростей реактивными самолётами и ракетопланами. В 1947 году экспериментальный ракетный самолёт Bell X-1 совершил свой первый в истории сверхзвуковой полёт и уже к 1960 году начали появляться предложения и проекты по полётам с гиперзвуковыми скоростями. За исключением проектов таких ракетопланов, как North American X-15, специально спроектированных для достижения больших скоростей, скорости реактивных самолётов оставались в пределах М1—3.
В 1950-х и 1960-х годах создавались различные экспериментальные гиперзвуковые ПВРД, которые испытывались на земле. Применительно к гражданскому авиатранспорту, основной целью создания и применения гиперзвуковых ПВРД считалось скорее снижение эксплуатационных расходов, чем сокращение длительности перелётов. Поскольку сверхзвуковые ТРД сложнее дозвуковых, а сверхзвуковые ЛА сложнее и имеют более низкое аэродинамическое качество, чем дозвуковые, то сверхзвуковые ЛА, оснащённые ТРД, расходуют значительно большее количество топлива, чем дозвуковые. Поэтому коммерческие авиакомпании предпочитали обслуживать авиалинии дозвуковыми широкофюзеляжными самолётами, а не сверхзвуковыми («Конкорд» и Ту-144). Рентабельность использования последних была едва заметна, а убыточность полётов Конкордов British Airways за время его эксплуатации в среднем составила 40 % (без учёта субсидирования полётов государством).
Одной из основных черт военных самолётов является достижение наибольшей манёвренности и скрытности, что противоречит аэродинамике гиперзвукового полёта. В период —1993 годов в США была предпринята серьёзная попытка создания одноступенчатой космической системы Rockwell X-30 (фирма en:Rockwell International, проект NASP, англ. National Aero-Space Plane) на базе гиперзвукового ПВРД, но она потерпела неудачу. Тем не менее, концепция гиперзвукового полёта не ушла со сцены и менее масштабные исследования продолжались на протяжении последних двух десятилетий. Например, 15 июня 2007 года DARPA и Министерство обороны Австралии сообщили об успешном гиперзвуковом полёте со скоростью 10М с использованием ракетного ускорителя для разгона до минимальной рабочей скорости на ракетном полигоне Ву́мера в центральной Австралии. В США Пентагон и НАСА сформировали Национальную гиперзвуковую стратегию (англ. National Hypersonics Strategy) с целью исследовать спектр возможностей гиперзвукового полёта. Великобритания, Австралия, Франция, Россия и Индия (проект RLV-TD) также имеют свои программы исследований, однако на 2009 год не было создано ни одного «рабочего» аппарата с гиперзвуковым ПВРД, — все имеющиеся и испытываемые модели и образцы создаются в рамках экспериментов по их исследованию.
В СССР разработкой подобных систем занимался Центральный институт авиационного моторостроения (ЦИАМ) имени П. И. Баранова, расположенный в городе Москве и Лыткарино. В 1970-х годах стартовали работы по созданию гиперзвукового ПВРД и гиперзвуковой летающей лаборатории (ГЛЛ) «Холод» на базе ракеты С-200, на которой в Казахстане было проведено уникальное лётное испытание гиперзвукового ПВРД на скорости 5,7M. На данный момент институт ведёт работы по перспективной ГЛЛ «Игла» («Исследовательский гиперзвуковой летательный аппарат») и «Холод-2» со сверхзвуковым ПВРД.
Проблема усложняется обнародованием, зачастую только частичным, ранее засекреченных материалов по экспериментам, которые сохраняются в тайне, но по которым, тем не менее, делаются утверждения о получении работоспособных моделей двигателя. Кроме этого, возникают сложности с подтверждением достоверности таких сведений и, в частности, факта сверхзвукового сгорания и получения требуемой тяги. Таким образом, по крайней мере четыре группы, в которые входят несколько государств и организаций, имеют законные основания утверждать, что являются «первыми».
Дозвуковые ПВРД
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М = 0,5 степень повышения давления в них (как следует из формулы (1) ) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (2)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M < 0,5 ПВРД практически неработоспособен. Но и на предельной для дозвукового диапазона скорости, то есть при М → 1, степень повышения давления составляет лишь 1,89, а идеальный термический КПД — лишь 16,7 %, что в 1,5 раза меньше, чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
История
— первый пилотируемый аппарат с маршевым ПВРД (первый полёт — 19 ноября 1946). Музей авиации и космонавтики в Ле-Бурже
В 1913 году француз получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, . Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые и , а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
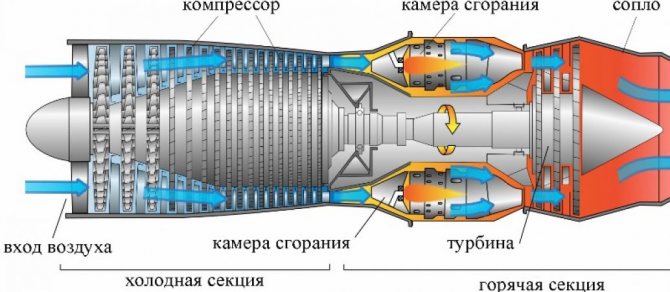
Устройство
Первый контур вмещает в себя компрессоры высокого и низкого давления, камеру сгорания, турбины высокого и низкого давления и сопло. Второй контур состоит из направляющего аппарата и сопла. Такая конструкция является базовой, но возможны и некоторые отклонения, например, потоки внутреннего и внешнего контура могут смешиваться и выходить через общее сопло, или же двигатель может оснащаться форсажной камерой.
Теперь коротко о каждом составляющем элементе ТРДД. Компрессор высокого давления (КВД) – это вал, на котором закреплены подвижные и неподвижные лопатки, формирующие ступень. Подвижные лопатки при вращении захватывают поток воздуха, сжимают его и направляют внутрь корпуса. Воздух попадает на неподвижные лопатки, тормозится и дополнительно сжимается, что повышает его давление и придает ему осевой вектор движения. Таких ступеней в компрессоре несколько, а от их количества напрямую зависит степень сжатия двигателя. Такая же конструкция и у компрессора низкого давления (КНД), который расположен перед КВД. Отличие между ними заключается только в размерах: у КНД лопатки имеют больший диаметр, перекрывающий собой сечение и первого и второго контура, и меньшее количество ступеней ( от 1 до 5).
В камере сгорания сжатый и нагретый воздух перемешивается с топливом, которое впрыскивается форсунками, а полученный топливный заряд воспламеняется и сгорает, образуя газы с большим количеством энергии. Камера сгорания может быть одна, кольцевая, или же выполняться из нескольких труб.
Турбина по своей конструкции напоминает осевой компрессор: те же неподвижные и подвижные лопатки на валу, только их последовательность изменена. Сначала расширенные газы попадают на неподвижные лопатки, выравнивающие их движение, а потом на подвижные, которые вращают вал турбины. В ТРДД турбин две: одна приводит в движение компрессор высокого давления, а вторая – компрессор низкого давления. Работают они независимо и между собой механически не связаны. Вал привода КНД обычно расположен внутри вала привода КВД.
Сопло – это сужающаяся труба, через которую выходят наружу отработанные газы в виде реактивного потока. Обычно каждый контур имеет свое сопло, но бывает и так, что реактивные потоки на выходе попадают в общую камеру смешения.
Внешний, или второй, контур – это полая кольцевая конструкция с направляющим аппаратом, через которую проходит воздух, предварительно сжатый компрессором низкого давления, минуя камеру сгорания и турбины. Этот поток воздуха, попадая на неподвижные лопасти направляющего аппарата, выравнивается и движется к соплу, создавая дополнительную тягу за счет одного только сжатия КНД без сжигания топлива.
Форсажная камера – это труба, размещенная между турбиной низкого давления и соплом. Внутри у нее установлены завихрители и топливные форсунки с воспламенителями. Форсажная камера дает возможность создания дополнительной тяги за счет сжигания топлива не в камере сгорания, а на выходе турбины. Отработанные газы после прохождения ТНД и ТВД имеют высокую температуру и давления, а также значительное количество несгоревшего кислорода, поступившего из второго контура. Через форсунки, установленные в камере, подается топливо, которое смешивается с газами, и воспламеняется. В результате тяга на выходе возрастает порой в два раза, правда, и расход топлива при этом тоже растет. ТРДД, оснащенные форсажной камерой, легко узнать по пламени, которое вырывается из их сопла во время полета или при запуске.
форсажная камера в разрезе, на рисунке видны завихрители.
Самым важным параметром ТРДД является степень двухконтурности (к) – отношение количества воздуха, прошедшего через второй контур, к количеству воздуха, прошедшего через первый. Чем выше этот показатель, тем более экономичным будет двигатель. В зависимости от степени двухконтурности можно выделить основные виды двухконтурных турбореактивных двигателей. Если его значение к<2, это обычный ТРДД, если же к>2, то такие двигатели называются турбовентиляторными (ТВРД). Есть также турбовинтовентиляторные моторы, у которых значение достигает и 50-ти, и даже больше.
В зависимости от типа отведения отработанных газов различают ТРДД без смешения потоков и с ним. В первом случае каждый контур имеет свое сопло, во втором газы на выходе попадают в общую камеру смешения и только потом выходят наружу, образуя реактивную тягу. Двигатели со смешением потоков, которые устанавливаются на сверхзвуковые самолеты, могут снабжаться форсажной камерой, которая позволяет увеличивать мощность тяги даже на сверхзвуковых скоростях, когда тяга второго контура практически не играет роли.
Полицейские погоны: как пришивать?
Хотя внешний вид погон разных подразделений отличается, вариант их правильной обработки один.
Пришиваются погоны только:
- на китель полиции или любой другой спецслужбы;
- на шинель;
- на бушлат.

На рубашку они не пришиваются, так как поверх рубашки может надеваться китель или бушлат, погоны в этом случае окажутся закрытыми. Но так как летом рубашка носится без верхней одежды, а чин военного должен быть виден, надеваются временные погоны. Для этого к обратной стороне пришивается петелька, которая продевается на пуговицу на рубашке. Если нет времени или возможности пришить пуговицу, можно использовать обычную канцелярскую скрепку, которая отлично справляется с поставленной задачей.
См. также
Классы реактивных двигателей:
Все реактивные двигатели подразделяют на 2 класса:
- Воздушно-реактивные – тепловые двигатели, использующие энергию окисления воздуха, получаемого из атмосферы. В этих двигателях рабочее тело представлено смесью продуктов горения с остальными элементами отобранного воздуха.
- Ракетные – двигатели, которые на борту содержат все необходимые компоненты и способны работать даже в безвоздушном пространстве.
Прямоточный воздушно-реактивный двигатель – самый простой в классе ВРД по конструкции. Требуемое для работы устройства повышение давления образуется путем торможения встречного воздушного потока.

Рабочий процесс ПВРД можно кратко описать следующим образом:
Во входное устройство двигателя поступает воздух со скоростью полета, кинетическая его энергия преобразуется во внутреннюю, давление и температура воздуха повышаются. На входе в камеру сгорания и по всей длине проточной части наблюдается максимальное давление.
- Нагревание сжатого воздуха в камере сгорания происходит путем окисления подаваемого воздуха, при этом внутренняя энергия рабочего тела увеличивается.
- Далее поток сужается в сопле, рабочее тело достигает звуковой скорости, а вновь при расширении – сверхзвуковой. За счет того, что рабочее тело движется со скоростью, превышающей скорость встречного потока, внутри создается реактивная тяга.
В конструктивном плане ПВРД является предельно простым устройством. В составе двигателя есть камера сгорания, внутрь которой горючее поступает из топливных форсунок, а воздух – из диффузора. Камера сгорания заканчивается входом в сопло, которое является суживающейся-расширяющимся.
Развитие технологии смесевого твердого топлива повлекло за собой использование этого горючего в ПВРД. В камере сгорания располагается топливная шашка с центральным продольным каналом. Проходя по каналу, рабочее тело постепенно окисляет поверхность топлива и нагревается само. Применение твердого горючего еще более упрощает состоящую конструкцию двигателя: топливная система становится ненужной.
Смесевое топливо по своему составу в ПВРД отличается от применяемого в РДТТ. Если в ракетном двигателе большую часть состава топлива занимает окислитель, то в ПВРД он используется в небольших пропорциях для активирования процесса горения.
Наполнитель смесевого топлива ПВРД преимущественно состоит из мелкодисперсного порошка бериллия, магния или алюминия. Их теплота окисления существенно превосходит теплоту сгорания углеводородного горючего. В качестве примера твердотопливного ПВРД можно привести маршевый двигатель крылатой противокорабельной ракеты «П-270 Москит».

Тяга ПВРД зависит от скорости полета и определяется исходя из влияния нескольких факторов:
- Чем больше показатель скорости полета, тем большим будет расход воздуха, проходящего через тракт двигателя, соответственно, большее количество кислорода будет проникать в камеру сгорания, что увеличивает расход топлива, тепловую и механическую мощность мотора.
- Чем больше расход воздуха сквозь тракт двигателя, тем выше будет создаваемая мотором тяга. Однако существует некий предел, расход воздуха сквозь тракт мотора не может увеличиваться неограниченно.
- При возрастании скорости полета увеличивается уровень давления в камере сгорания. Вследствие этого увеличивается термический КПД двигателя.
- Чем больше разница между скоростью полета аппарата и скоростью прохождения реактивной струи, тем больше тяга двигателя.
Зависимость тяги прямоточного воздушно-реактивного двигателя от скорости полета можно представить следующим образом: до того момента, пока скорость полета намного ниже скорости прохождения реактивной струи, тяга будет увеличиваться вместе с ростом скорости полета. Когда скорость полета приближается к скорости реактивной струи, тяга начинает падать, миновав определенный максимум, при котором наблюдается оптимальная скорость полета.
В зависимости от скорости полета выделяют такие категории ПВРД:

Каждая из групп имеет свои отличительные особенности конструкции.
Прямоточные воздушно-реактивные двигатели
Эта разновидность двигателей функционирует таким образом, что не нуждается в подвижных деталях. Воздушные массы нагнетаются в камеру сгорания непринужденным путем, благодаря торможению потоков об обтекатели входных отверстий. В дальнейшем совершается все то же, что и в обыкновенных реактивных двигателях, а именно воздушные потоки смешиваются с топливом и выходят как реактивные струи из сопел. Прямоточные воздушно-реактивные двигатели применяются в поездах, в воздушных суднах, в «беспилотниках», в ракетах, кроме того они могут устанавливаться на велосипеды или скутеры.
Источник
Гиперзвуковой прямоточный воздушно-реактивный двигатель
К категории гиперзвуковых ПВРД относится ПВРД, который работает на скоростях более 5М. По состоянию на начало XXI века существование такого двигателя было только гипотетическим: не собрано ни единого образца, который бы прошел летные испытания и подтвердил целесообразность и актуальность его серийного выпуска.
На входе в устройство ГПВРД торможение воздуха выполняется только частично, и на протяжении остального такта перемещение рабочего тела является сверхзвуковым. Большая часть кинетической исходной энергии потока при этом сохраняется, после сжатия температура относительно низкая, что позволяет освободить рабочему телу значительное количество тепла. После входного устройства проточная часть двигателя по всей своей длине расширяется. За счет сгорания топлива в сверхзвуковом потоке происходит нагрев рабочего тела, оно расширяется и ускоряется.
Этот тип двигателя предназначен для проведения полетов в разреженной стратосфере. Теоретически такой двигатель можно использовать на многоразовых носителях космических аппаратов.
Одной из главных проблем конструирования ГПВРД является организация сгорания топлива в сверхзвуковом потоке.
В разных странах начаты несколько программ по созданию ГПВРД, все они находятся на стадии теоретических изысканий и предпроектных лабораторных исследований.
Где применяются ПВРД
ПВРД не работает при нулевой скорости и низких скоростях полета. Летательный аппарат с таким двигателем требует установки на нем вспомогательных приводов, в роли которых может выступать твердотопливный ракетный ускоритель или самолет-носитель, с которого производится запуск аппарата с ПВРД.
По причине неэффективности ПВРД на малых скоростях его практически неуместно использовать на пилотируемых самолетах. Такие двигатели предпочтительно использовать для беспилотных, крылатых, боевых ракет одноразового применения благодаря надежности, простоте и дешевизне. ПВРД также применяют в летающих мишенях. Конкуренцию по характеристикам ПВРД составляет только ракетный двигатель.
См. также
Оценка проекта
Прохождение медицинского освидетельствования в комиссариате
Принцип работы реактивного двигателя
В реактивных двигателях струи воздушных потоков, которые попадают в двигатели, встречаются с обращающимися с колоссальной скоростью турбинами компрессоров, которые засасывают воздух из окружающей среды (при помощи встроенных вентиляторов). Следовательно, происходит решение двух задач:
- Первичное забирание воздуха;
- Охлаждение в целом всего двигателя.
Это могут быть, в частности, смеси воздуха и керосина, как в турбореактивных двигателях современных реактивных самолетах, либо смеси жидкого кислорода и спирта, такими обладают кое-какие жидкостные ракетные двигатели, либо еще какое-то твердое топливо в пороховых ракетах. Как только образовалась топливно-воздушная смесь, происходит ее воспламенение с выделением энергии в виде тепла. Таким образом, топливом в реактивных двигателях могут быть только такие вещества, которые в результате химических реакций в двигателях (при возгорании) выделяют тепло, при этом образуя множество газов.
При возгорании совершается существенное разогревание смеси и деталей вокруг с объемным расширением. Собственно говоря, реактивные двигатели пользуются для продвижения управляемыми взрывами. Камеры сгорания в реактивных двигателях — это одни из самых горячих элементов (температурный режим в них может достигать до 2700 °С), и они требуют постоянного интенсивного охлаждения.
Турбореактивные двигатели функционируют несколько иначе. Так, газы, после камер сгорания, вначале проходят турбинами, которым отдают свою тепловую энергию. Это делается для того, чтобы привести в движение компрессоры, которые послужат для сжатия воздуха перед камерой сгорания. В любом случае, сопла остаются последними частями двигателей, через которые протекут газы. Собственно они и формируют непосредственно реактивную струю.

В сопла направляют холодный воздух, который нагнетается при помощи компрессоров, чтобы охлаждать внутренние детали двигателей. Реактивные сопла могут обладать различными конфигурациями и конструкциями исходя из разновидностей двигателей. Так, когда скорость проистекания должна быть выше скорости звука, тогда соплам придаются формы расширяющихся труб или же вначале суживающиеся, а далее расширяющиеся (так называемые сопла Лаваля). Только с трубами такой конфигурации газы разгоняются до сверхзвуковых скоростей, при помощи чего реактивные самолеты перешагивают «звуковые барьеры».
Исходя из того, задействуется ли в процессе работы реактивных двигателей окружающая среда, они подразделяются на основные классы воздушно-реактивных двигателей (ВРД) и ракетных двигателей (РД). Все ВРД являются тепловыми двигателями, рабочие тела которых образуются тогда, когда происходит реакция окисления горючих веществ с кислородом воздушных масс. Поступающие из атмосферы воздушные потоки составляют основу рабочих тел ВРД. Таким образом, аппараты с ВРД несут на борту источники энергии (топливо), но большая часть рабочих тел черпается из окружающей среды.
К аппаратам ВРД относятся:
- Турбореактивные двигатели (ТРД);
- Прямоточные воздушно-реактивные двигатели (ПВРД);
- Пульсирующие воздушно-реактивные двигатели (ПуВРД);
- Гиперзвуковые прямоточные воздушно-реактивные двигатели (ГПВРД).

От крылатой ракеты Буревеснтик до космического корабля с ядерным двигателем
Но главным выводом следует считать перспективы использования этой технологии в космонавтике. Если крылатая ракета с ядерной силовой установкой реализована и действует, то нет никаких преград для реализации межпланетных космических кораблей на ядерной тяге. А это совсем другая космонавтика! Месяц до Марса вместо года – это как минимум, а в перспективе – еще быстрее. А это открывает реальные перспективы для пилотируемых полетов в дальний космос и колонизации планет.
Диаметр «Калибра» составляет 0,533 м при длине ракеты 6,2-8,22 м в разных модификациях.
Виды компоновок турбовинтовентиляторных двигателей
На сегодняшний момент в мире встречаются ТВВД 2 основных компоновок, по расположению винтовентилятора.
а — винтовентилятор впереди; б — винтовентилятор в обтекателе; в — винтовентилятор сзади
В отличие от ТВРД ТВВД не имеет второго контура, как такового, то есть у него нет внешнего корпуса. Винтовентилятор может оснащаться обтекателем, который иногда ошибочно принимается за внешний корпус второго контура, но это совсем не обязательно – он может выполняться и полностью открытым. Сам винтовентилятор – это винт с укороченными лопастями сложной геометрической формы. Их саблевидная форма позволяет не просто пропускать воздух, создавая тягу, но и частично сжимать его и направлять на компрессор, а также уменьшать волновое аэродинамическое сопротивление. Двигатель может иметь один винтовентилятор или два, вращающихся в противоположные стороны. Разное направление вращения – это еще одна причина использования планетарного редуктора.
В сравнении с турбовинтовым двигателем турбовинтовентиляторный менее шумный, при его работе уровень вибраций гораздо ниже. Если же сравнить его с турбовентиляторным реактивным двигателем, то, благодаря высокой степени двухконтурности, он сжигает меньше топлива при одинаковой мощности (экономия составляет порядка 25-30%).