Основное уравнение радиолокации
Содержание:
- Дальность действия радиолокатора с активным ответом
- Модификации
- Что такое АРУ в приемнике?
- История
- Отличия ЗИЛ-164 от ЗИС-150
- Дальность действия радиолокатора с активным ответом
- Эстафета переходит в Германию
- Многообразие модельного ряда ЗИЛ-164
- Основные методы радиолокации
- Двигатель — агрегат, приводящий автомобиль в движение
- Российский внедорожник ГАЗ-3106
- Случайные
- Типы боеприпасов
- Принимаемая мощность
- Диапазоны РЛС
- Классификация
- Двигатель — агрегат, приводящий автомобиль в движение
- Дальность действия РЛС
- Радиолокация
- Операторы
- См. также
- Принимаемая мощность
- Классификация
Дальность действия радиолокатора с активным ответом
Активный ответ приходит от радиолокационного ответчика (ретранслятора), установленного на цели.
Максимальная дальность действия по каналу запроса
- Dreq.max=PreqGreqAr4πPr.min{\displaystyle D_{req.max}={\sqrt {{P_{req}G_{req}A_{r}} \over {4\pi P_{r.min}}}}}
Максимальная дальность действия по каналу ответа
- Dresp.max=PrespGrespAr4πPr.min{\displaystyle D_{resp.max}={\sqrt {{P_{resp}G_{resp}A_{r}} \over {4\pi P_{r.min}}}}}
При работе с активным ответом, расстояние входит в формулы со степенью 2, а не 4, так как мощность ответчика является фиксированной и не зависит от мощности падающего на «цель» излучения радара. В случае же пассивного ответа, цель, согласно принципу Гюйгенса-Френеля, представляет собой вторичный переизлучатель, мощность которого прямо пропорциональна падающему на него излучению радара. Таким образом, при пассивной радиолокации сигнал от передатчика радара по пути к цели ослабевает в 4πRt2{\displaystyle 4\pi R_{t}^{2}} раз, отражается, а затем по пути от цели до приемника радара ослабевает еще в 4πRr2{\displaystyle 4\pi R_{r}^{2}}. В результате получаем коэффициент (4π)2Rt2Rr2{\displaystyle {(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}, и в случае, когда Rt = Rr = R, этот коэффициент равен (4π)2R4{\displaystyle {(4\pi )}^{2}R^{4}}.
Модификации
ВОГ-25ИН
Индекс ГРАУ — 7П17И
. Практический выстрел с гранатой в инертном снаряжении, применяется для тренировок и обучения стрельбе,а также приведения ГП-25 к нормальному бою и проверке боя.
ВУС-25
(индекс 7П44У) — учебная граната, применяется для тренировок и обучения.
ВОГ-25П
Индекс ГРАУ — 7П24
, шифр «Подкидыш». Выстрел с «подпрыгивающей» осколочной гранатой, оснащённый взрывателемВГМ-П с вышибным зарядом и пиротехническим замедлителем. Принят на вооружение в 1979 году.
При попадании в преграду выстрел подскакивает и взрывается в воздухе на высоте около 1,5 метров. В сравнении с ВОГ-25, «подпрыгивающий» боеприпас позволяет эффективнее поражать лежащего и находящегося в траншее или окопе противника.
Описание:
- Калибр 40 мм
- Начальная скорость 76 м/с
- Масса 275 г
- Масса ВВ 42 г
- Длина 125 мм
- Дистанция взведения 10 — 40 м
- Время самоликвидации не менее 14 с
- Средняя высота разрыва 75 см
«Гвоздь»
40-мм выстрел «Гвоздь»
с газовой гранатой — предназначен для создания газового облака с непереносимо-допустимой концентрацией ирританта (раздражающего вещества) CS. Состоит на вооружении МВД РФ.
40-мм выстрел с дымовой гранатой ВДГ-40 «Нагар»
— применяется для постановки дымовой завесы.
ВОГ-25М
Модернизированный вариант выстрела ВОГ-25 с осколочной гранатой, частично унифицирован с ВОГ-25ПМ. Разработан в начале 2000-х годов.
ВОГ-25ПМ
Модернизированный вариант выстрела ВОГ-25П с «подпрыгивающей» осколочной гранатой, частично унифицирован с ВОГ-25М. Разработан в начале 2000-х годов.
АСЗ-40
40-мм выстрел акустического действия АСЗ-40 «Свирель»
. Светозвуковая граната нелетального действия служит для временного подавления психоволевой устойчивости живой силы противника. Состоит на вооружении МВД РФ.
В настоящее время имеет место тенденция к дальнейшему расширению типов боеприпасов. Так, на международной оружейной выставке «Defendory-2006» были представлены новые виды гранат:
- ВГ-40МД — выстрел с дымовой гранатой
- ВГС-40-1 — выстрел с сигнальной гранатой (красный огонь)
- ВГС-40-2 — выстрел с сигнальной гранатой (зеленый огонь)
- ВГ-40И — выстрел с осветительной гранатой
Однако нет сведений, что эти боеприпасы были приняты на вооружение или находятся в серийном производстве.
Что такое АРУ в приемнике?
История
Доступность недорогих микропроцессоров и развитие передовых компьютерных технологий в течение 1970-х и 1980-х годов сделали возможным применение компьютерных технологий для улучшения коммерческих морских радарных систем. Производители радаров использовали эту технологию для создания средств автоматической радиолокационной прокладки. ARPA — это компьютерные системы обработки радиолокационных данных, которые генерируют прогнозные векторы и другую информацию о движении судов.
Международная морская организация (ИМО) установила определенные стандарты , вносящие изменения в Международную конвенцию по охране человеческой жизни на море требований в отношении переноса соответствующих автоматизированных радиолокационных черчения средств. Основная функция ARPA может быть резюмирована в заявлении, содержащемся в Стандартах производительности IMO. В нем говорится о требовании ARPA: «улучшить стандарт предотвращения столкновений на море: уменьшить рабочую нагрузку на наблюдателей, позволив им автоматически получать информацию, чтобы они могли работать с несколькими целями так же хорошо, как если бы они вручную наносили на карту одну цель» . Как мы видим из этого заявления, основными преимуществами ARPA являются снижение нагрузки на персонал моста и более полная и быстрая информация по выбранным целям.
Типичная функция ARPA дает представление о текущей ситуации и использует компьютерные технологии для прогнозирования будущих ситуаций. ARPA оценивает риск столкновения и позволяет оператору видеть предлагаемые маневры на собственном судне.
Хотя на рынке доступно множество различных моделей ARPA, обычно предоставляются следующие функции:
- Представление радара истинного или относительного движения.
- Автоматическое обнаружение целей плюс ручное обнаружение.
- Цифровое считывание обнаруженных целей, которое обеспечивает курс, скорость, дальность, пеленг, ближайшую точку сближения (CPA и время до CPA (TCPA).
- Возможность отображать информацию об оценке столкновения непосредственно на индикаторе планового положения (PPI) с использованием векторов (истинных или относительных) или графического отображения прогнозируемой зоны опасности (PAD).
- Возможность выполнять пробные маневры, включая изменение курса, изменение скорости и комбинированное изменение курса / скорости.
- Автоматическая стабилизация грунта для навигационных целей. ARPA обрабатывает радиолокационную информацию намного быстрее, чем обычный радар, но все же имеет те же ограничения. Данные ARPA настолько точны, насколько точны данные, поступающие из таких входов, как гироскоп и журнал скорости.
Отличия ЗИЛ-164 от ЗИС-150
Новый грузовик создавался на заводе имени Лихачёва в качестве приемника ЗИС-150, который на то время считался достаточно устаревшим. Хотя последние модификации ЗИС-150 практически не отличались от первых ЗИЛ-164, партия требовала не очередной модернизации, а создания абсолютно новой модели, поэтому в 1957 году на базе ЗИС конструкторы создали новый автомобиль.
Его внешность сразу наводила мысли о том, что это модернизированный ЗИС, но некоторые отличия в конструкции моделей всё же имелись:
- Рама автомобиля стала мощнее;
- Двигатель тоже был более мощным;
- Установили карбюратор новой модели;
- Появились телескопические амортизаторы;
- Появилась системе обдува ветровых стёкол;
- Отопитель новой конструкции.
Кроме того, в конструкцию автомобиля было внесено ещё множество различных мелких изменений, которые незаметны с первого взгляда. Например, новый радиатор, более высокие крылья и т.п.
Машина стала выпускаться серийно с 1957 года, и выпускалась до 1964 года. В 1961 году произошла серьёзная модернизация автомобиля, так как на заводе готовились к выпуску совершенно нового грузовика ЗИЛ-130. С 1961 года завод выпускал модель ЗИЛ-164А, который получил часть узлов от новой, более совершенной модели. Последняя модификация получила новое однодисковое сцепление, карданы, тормозной кран. Кроме того, КПП ЗИЛ-164А тоже была взята от модели с индексом 130.
В некоторых источниках указывается, что первые модификации ЗИЛ-164 назывались ЗИС, но это неправда. Завод переименовали в 1956 году, первые автомобили сошли с конвейера только через год после этого, а вот ЗИС-150 действительно назывался ЗИЛ. Последние модели, которые выпускались в 1956 году, имели надпись «ЗИЛ».
Дальность действия радиолокатора с активным ответом
Активный ответ приходит от радиолокационного ответчика (ретранслятора), установленного на цели.
Максимальная дальность действия по каналу запроса
- Dreq.max=PreqGreqAr4πPr.min{\displaystyle D_{req.max}={\sqrt {{P_{req}G_{req}A_{r}} \over {4\pi P_{r.min}}}}}
Максимальная дальность действия по каналу ответа
- Dresp.max=PrespGrespAr4πPr.min{\displaystyle D_{resp.max}={\sqrt {{P_{resp}G_{resp}A_{r}} \over {4\pi P_{r.min}}}}}
При работе с активным ответом, расстояние входит в формулы со степенью 2, а не 4, так как мощность ответчика является фиксированной и не зависит от мощности падающего на «цель» излучения радара. В случае же пассивного ответа, цель, согласно принципу Гюйгенса-Френеля, представляет собой вторичный переизлучатель, мощность которого прямо пропорциональна падающему на него излучению радара. Таким образом, при пассивной радиолокации сигнал от передатчика радара по пути к цели ослабевает в 4πRt2{\displaystyle 4\pi R_{t}^{2}} раз, отражается, а затем по пути от цели до приемника радара ослабевает еще в 4πRr2{\displaystyle 4\pi R_{r}^{2}}. В результате получаем коэффициент (4π)2Rt2Rr2{\displaystyle {(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}, и в случае, когда Rt = Rr = R, этот коэффициент равен (4π)2R4{\displaystyle {(4\pi )}^{2}R^{4}}.
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
Многообразие модельного ряда ЗИЛ-164
За годы выпуска ЗИЛ-164 было создано множество модификаций этого грузовика. Большинство из них использовалось на стройках и в сельском хозяйстве. Вот основные модели этого популярного в 1960-х годах автомобиля:
- Базовые модели ЗИЛ-164 представляют собой бортовой грузовик. Имеют деревянный кузов с тремя откидными бортами;
- ЗИЛ-164Р– это усовершенствованная модель, которая имеет более мощный двигатель, развивающий до 109 л.с. Кроме двигателей, они отличались карбюраторами модели МКЗ-К-84. Эти модификации специально предназначались для работы в качестве тягачей, которые могли буксировать прицепы массой до 4,5 тонн. Если грузовик базовой модификации не рекомендовалось постоянно эксплуатировать с прицепом, то эта модель предназначалась именно для этого;
- ЗИЛ-164Д – специальные модификации бортовых автомобилей, оснащённые экранированным электрооборудованием;
- ЗИЛ-164Г – шасси, на которое устанавливалось специальное оборудование и грузовые платформы различного типа, предназначенные для специфических нужд;
- ЗИЛ-ММЗ-164Н представляет собой настоящий седельный тягач. Тоже оснащён новым карбюратором и форсированным мотором;
- ЗИЛ-ММЗ-585И – строительный самосвал;
- ЗИЛ-ММЗ-5875К – сельскохозяйственный самосвал.
Кроме того, завод имени Лихачёва пошёл на интересный эксперимент и начал выпускать грузовики, предназначенные для эксплуатации на сжиженном газе. Это были модификации ЗИЛ-156А, ЗИЛ-166 и ЗИЛ-166А. Технические характеристики данного автомобиля позволяли эксплуатировать его не только на газу, но и на бензине. Так как производство бензина в 60-х годах было избыточным, а сам он стоил копейки, то газовые модификации встречались крайне редко.
Основные методы радиолокации
РЛС непрерывного излучения
Используются в основном для определения радиальной скорости движущегося объекта (использует эффект Доплера). Достоинством РЛС такого типа является дешевизна и простота использования, однако в таких РЛС сильно затруднено измерение расстояния до объекта.
Пример: простейший радар для определения скорости автомобиля.
Импульсный метод радиолокации
При импульсном методе радиолокации передатчики генерируют колебания в виде кратковременных импульсов, за которыми следуют сравнительно длительные паузы. Причём длительность паузы выбирается исходя из дальности действия РЛС Dmax.
T>2Dmaxc{\displaystyle T>{2D_{max} \over c}}
Сущность метода состоит в следующем:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС.
Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал.
Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
Двигатель — агрегат, приводящий автомобиль в движение
На серии автомобилей ЗИЛ-164 установлен карбюраторный четырехтактный двигатель, имеющий шесть цилиндров, которые расположены в один ряд.
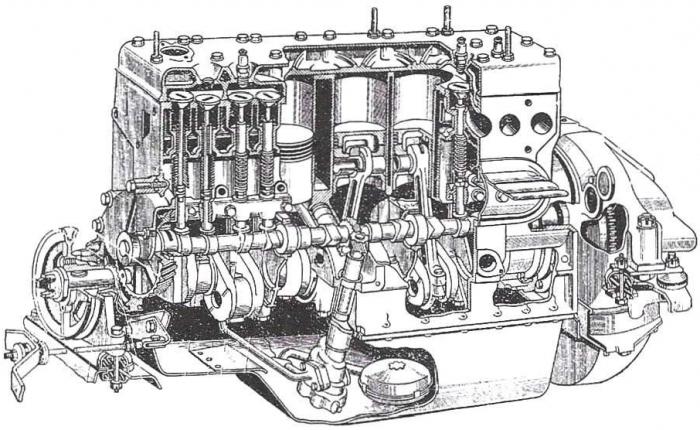
Отливаются они одним блоком. Вокруг каждого цилиндра имеется рубашка водяного охлаждения. Головка цилиндров выполнена из сплава алюминия и крепится к блоку цилиндров болтами и удлиненными шпильками. Они используются для транспортировки двигателя, а передние, кроме этого, предназначены для крепления компрессора. В головке блока цилиндров имеются камеры сгорания. Поэтому эта деталь мотора также изготавливается с водяной рубашкой. Поршни литые, выполнены из алюминиевого сплава, имеют плоское дно. На головке каждого установлены четыре кольца. Сверху три компрессионных, а под ними — одно маслосъемное. Коленчатый вал изготовлен из стали. Поверхности шеек закалены высокочастотными токами. Закрепляется на семи подшипниках скольжения, в которых применяются стальные вкладыши с баббитовой заливкой. Закрепляется двигатель к раме в трех точках через резиновые подушки.
Российский внедорожник ГАЗ-3106
Случайные
Типы боеприпасов
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Диапазоны РЛС
Основная статья: Диапазон частот
| ОбозначениеIEEE / ITU | Этимология | Частоты | Длина волны | Примечания |
|---|---|---|---|---|
| HF | англ. high frequency | 3—30 МГц | 10—100 м | Радары береговой охраны, «загоризонтные» РЛС |
| P | англ. previous | > 1 м | Использовался в первых радарах | |
| VHF | англ. very high frequency | 50—330 МГц | 0,9—6 м | Обнаружение на больших дальностях, исследования Земли |
| UHF | англ. ultra high frequency | 300—1000 МГц | 0,3—1 м | Обнаружение на больших дальностях (например, артиллерийского обстрела), исследования лесов, поверхности Земли |
| L | англ. Long | 1—2 ГГц | 15—30 см | наблюдение и контроль над воздушным движением |
| S | англ. Short | 2—4 ГГц | 7,5—15 см | управление воздушным движением, метеорология, морские радары |
| C | англ. Compromise | 4—8 ГГц | 3,75—7,5 см | метеорология, спутниковое вещание, промежуточный диапазон между X и S |
| X | 8—12 ГГц | 2,5—3,75 см | управление оружием, наведение ракет, морские радары, погода, картографирование среднего разрешения; в США диапазон 10,525 ГГц ± 25 МГц используется в РЛС аэропортов | |
| Ku | англ. under K | 12—18 ГГц | 1,67—2,5 см | картографирование высокого разрешения, спутниковая альтиметрия |
| K | нем. kurz — «короткий» | 18—27 ГГц | 1,11—1,67 см | использование ограничено из-за сильного поглощения водяным паром, поэтому используются диапазоны Ku и Ka. Диапазон K используется для обнаружения облаков, в полицейских дорожных радарах (24,150 ± 0,100 ГГц). |
| Ka | англ. above K | 27—40 ГГц | 0,75—1,11 см | Картографирование, управление воздушным движением на коротких дистанциях, специальные радары, управляющие дорожными фотокамерами (34,300 ± 0,100 ГГц) |
| mm | 40—300 ГГц | 1—7,5 мм | миллиметровые волны, делятся на два следующих диапазона | |
| V | 40—75 ГГц | 4,0—7,5 мм | медицинские аппараты КВЧ, применяемые для физиотерапии | |
| W | 75—110 ГГц | 2,7—4,0 мм | сенсоры в экспериментальных автоматических транспортных средствах, высокоточные исследования погодных явлений |
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.
Двигатель — агрегат, приводящий автомобиль в движение
Дальность действия РЛС
Основная статья: Основное уравнение радиолокации
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы. В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
- Dmax=PnDaSaσ(4π)2Pn.min4{\displaystyle D_{max}={\sqrt{\frac {P_{n}D_{a}S_{a}\sigma }{\left(4\pi \right)^{2}P_{n.min}}}}},
где:
- Pn{\displaystyle \;P_{n}} — мощность генератора;
- Da{\displaystyle \;D_{a}} — коэффициент направленного действия антенны;
- Sa{\displaystyle \;S_{a}} — эффективная площадь антенны;
- σ{\displaystyle \;\sigma } — эффективная площадь рассеяния цели;
- Pn.min{\displaystyle \;P_{n.min}} — минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Работа нескольких РЛС в одном частотном диапазоне
На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту.
Мнимое изображение
При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС. Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте
Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда
Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда. Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды. Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Радиолокация
Кроме телевидения и радиовещания, очень важное значение в нашей жизни имеет радиолокация. Радиолокация – это определение и обнаружение местоположения различных объектов при помощи радиоволн. Радиолокация широко распространена в радиосвязи
Радиолокация осуществляется при помощи прибора – радиолокатора (радара) (рис. 8)
Радиолокация широко распространена в радиосвязи. Радиолокация осуществляется при помощи прибора – радиолокатора (радара) (рис. 8).
Рис. 8. Радар (Источник)
В радарах антенны передающая и приемная соединены вместе, радиолокатор – это комбинация приемника и передающего устройства. Работает радиолокатор в импульсном режиме (рис. 9).
Рис. 9. Принцип работы радиолокатора (Источник)
Импульсный режим составляет одну миллионную секунды. Посылается сигнал – и радар автоматически переключается на прием этого сигнала, свойства работы радара основаны на том, что электромагнитная волна способна отражаться от поверхности. Вот этот отраженный сигнал радар и принимает в тот момент времени, когда он работает на прием. Расстояние до цели при помощи радара определяются по формуле, которую используют
при расчетах:
S = с · Δt / 2
В этой формуле представлено расстояние до цели (S), скорость электромагнитной волны (с) – величина постоянная и соответствует скорости в 300 000 км/с, время от момента подачи сигнала до момента приема сигнала, деленное пополам, так как сигнал идет до цели и обратно. Радиолокация используется не только на земле, но и в астрономии для обеспечения взаимосвязи между различными космическими телами и Землей. Определение расстояния до Луны было осуществлено с помощью радиолокатора. Был послан сигнал, получен отраженный сигнал, в результате чего уточнили расстояние от Земли до Луны.
Сегодня в астрономии радиолокация занимает свое особое место, радиоастрономия – это один из видов очень серьезных, быстроразвивающихся частей науки.
Операторы
См. также
Принимаемая мощность
Мощность принимаемого отклика радиосигнала задаётся уравнением:
- Pr=PtGtArσF4(4π)2Rt2Rr2=Pt⋅Gt4πRt2⋅F2⋅σ⋅F2⋅Ar4πRr2{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R_{t}^{2}R_{r}^{2}}}=P_{t}\cdot {{G_{t}} \over {4\pi R_{t}^{2}}}\cdot F^{2}\cdot {\sigma }\cdot F^{2}\cdot {{A_{r}} \over {4\pi R_{r}^{2}}}}
Обозначения:
- Pr — мощность сигнала приёмной антенны;
- Pt — мощность радиопередатчика;
- Gt — коэффициент усиления передающей антенны;
- Ar (иногда S) — эффективная площадь (апертура) приемной антенны, Ar = Gr*λ²/4π, где Gr — коэффициент усиления приемной антенны, λ — длина волны.
- σ — эффективная площадь рассеяния цели в данном ракурсе;
- F — коэффициент потерь при распространении сигнала;
- Rt — расстояние от передающей антенны до цели;
- Rr — расстояние от цели до приёмной антенны.
В случае, когда передающая и приёмная антенны располагаются на одинаковом расстоянии от цели, то есть во всех моностатических РЛС (Однопозиционных радиолокационных системах, ОПРЛС) и иногда, в других типах, формула упрощается за счет Rt = Rr = R, что приводит к коэффициенту R4:
- Pr=PtGtArσF4(4π)2R4.{\displaystyle P_{r}={{P_{t}G_{t}A_{r}\sigma F^{4}} \over {{(4\pi )}^{2}R^{4}}}.}
Таким образом, принимаемая мощность уменьшается пропорционально 4-й степени расстояния.
Коэффициент F можно принять равным 1, если считать, что волна распространяется в вакууме без потерь и без интерференции.
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.




